|
 |
|
|
 |
联系方式 |
 |
|
| 公司名: |
杭州智莱机电设备有限公司 |
| 电 话: |
13588879914 |
| 手 机: |
|
| 手 机: |
18958008193(VX同号) |
|
浙江省杭州市拱墅区金地繁华里7-103商铺 |
| 微信扫一扫:gk-bpq |
 |
| 客服QQ: |
 184757438 184757438 |
|
|
 |
|
 |
|
|
|
|
|
|
|
| 英威腾CHV190系列变频器在门座式起重机中的应用(2),INVTCHV190变频器维修 |
|
| 发表人:系统管理 发表时间:2012-10-14 20:15:02 点击次数:9411 |
一般的大吨位起重机有两个独立驱动的起升机构,每个起升机构由2台电动机同步驱动各自的钢丝绳卷筒转动,再经过动滑轮组多级减速提升吊钩。起升机构的变频调速传动方案采用一台变频器带一台电动机的“一拖一”方案,为了提高低速传动时的动态特性和高转矩输出能力,每台电动机采用带脉冲编码器的速度闭环控制。每个起升机构的2台变频器之间采用CHV190变频器提供的具有功率平衡和速度同步控制功能的主从控制方案,这些控制方案可以实现2台电动机精确的转矩平衡分配和2个起升机构的速度同步。
(2)行走、回转机构
门座式起重机的行走、回转机构大多采用多台电动机传动方案。由于门座式起重机行走机构的转动惯量较大,为了加速电动机需有较大的起动转矩,因此门座式起重机行走机构所需的电动机轴输出功率PM应由负载功率Pj和加速功率Pa组成,即:
PM≥Pj+Pa
行走机构所需的负载功率为:
µ Wν
Pj = ――――
6120η
式中 µ――行走机构的摩擦系数
W――行走机构额定负荷的重量,kg
ν――行走机构的额定速度,m/min
η――行走机构的机械效率
行走机构所需的加速功率为:
knM GD²nM
Pa = ――――― × ――――
974ηcosφ 375 tA
式中k――电流波形修正系数(PWM调制方式时取1.05―1.1)
nM ――行走机构的电动机额定转速,r/min
cosφ――电动机的功率因数
η――电动机效率
GD²――行走机构换算到电动机轴上的总转动惯量,kg・m²
tA――电动机加速时间(根据负载要求确定),s
由于行走机构大多采用一台变频器拖动多台电动机的通用U/f开环频率控制方式,因此在变频器容量选择时,还应满足以下公式:
ICN≥knIM
式中k――电流波形修正系数(PWM调制方式时取1.05―1.1)
ICN――变频器额定输出电流,A
IM――工频电源时单台电动机的额定电流,A
n――一台变频器拖动的电动机数量
5 再生能量的处理
当采用变频器传动的起升机构拖动位能性负载下放或行走机构急减速、顺风运行时,异步电动机将处于再生发电状态。逆变器中的六个回馈二极管将传动机构的机械能转换成电能回馈到中间直流回路,并引起储能电容两端电压升高。若不采取必要的措施,当直流回路电容电压升到保护极限值后变频器将过电压跳闸。
在高性能的工程型变频器中,对连续再生能量的处理有以下两种方案。① 在中间直流回路设置电阻器,让连续再生能量通过电阻器以发热的形式消耗掉,这种方式称为动力制动;② 采用再生整流器方式,将连续再生能量送回电网,这种方式称为回馈制动。英威腾推出的DBU型能耗制动单元和RBU型能量回馈单元的具体参数可参见说明书。
下面对这两种制动方式做以详细介绍。
(1)动力制动
动力制动由制动单元和制动电阻构成。变频器设置了制动单元和制动电阻后,其动力制动能力取决于制动电阻的允许功率。因此,计算再生功率PM时,必须满足 PM<PR(PR为制动电阻的允许功率)。如果再生功率超过制动电阻的允许功率时,要重新考虑减速时间及负载惯量等。下面详细叙述设置制动电阻后,如何计算制动电阻的再生功率PM和电阻值RB。
① 计算再生能量EM
② 计算再生功率PM
PM = EM/t0
式中 PM――制动期间电机产生的有效再生功率,W
EM――机构急减速及下降时的再生能量,J
t0――制动周期时间,S
③ 选择合适的制动单元/制动电阻组合
选择合适的制动单元/制动电阻组合,必须满足下列条件:
PM<PR&PM<PDB
式中 PM――制动期间电机产生的有效再生功率,W
PR――制动电阻的允许功率,W
PDB――制动单元的允许功率,W
当计算的PM>PR时,表明超出了制动电阻的处理能力,需重新核算负载惯量和减速时间。
④ 制动电阻RB0的计算
在再生回馈制动中,即使不设置制动电阻,依靠电机内部损耗也可获得约20%的制动转矩,因此可用下式计算所需的电阻值RB0:
VC²
RB0 = ――――――――――
1.027(TB-0.2TM)n1
式中VC――变频器中间直流回路的电压(约为700V),V
TB――制动转矩,kg・m
TM――电动机额定转矩,kg・m
n1――电动机开始减速时的速度,rpm
动力制动的放电回路由制动单元和制动电阻构成,其最大电流受制动晶体管最大允许电流IC的限制,制动电阻最小允许值RMIN=VC/IC。因此制动电阻选用时其实际值RB应满足以下条件:
RMIN < RB < RB0
上述选型是建立在精确的计算基础上,在实际工程中如果精确的计算数据不能取得,也可按下述给出的经验公式选型。
①起升机构的再生功率PM
PM = Pb×ηtotal
ηtotal=ηmec×ηmot×0.98
上式中,Pb为实际的负载再生发电功率,ηmec为机械效率,ηmot为电机效率。
②制动电阻RB0的近似计算
VC²
RB0 = ――
PM
由于行走机构属于摩擦负载,其制动单元和制动电阻可按变频器的标准配置。
(2)回馈制动
为了实现把制动状态的电动机再生发电能量向电网回馈,网侧变流器应采用可逆变流器。英威腾推出的能量回馈制动单元,它的网侧变流器与逆变器结构相同,采用一块具有PWM控制方式的电网电压识别板。由于采用了PWM控制技术,对网侧交流电压的大小和相位可以进行控制,可以使交流输入电流与电网电压同相位并接近正弦波,传动系统的功率因数大于0.9,回馈制动时有100%电网回馈能力,而不需要自耦变压器。
动力制动方式控制简单、成本低,但节能效果不如回馈制动。回馈制动方式虽然节能效果好,能连续长时制动,但控制复杂、成本较高。应该注意的是,只有在不易发生故障的稳定电网电压下,才可以采用回馈制动方式。对于采用滑触线供电的起重机,应特别注意防止滑触线电刷接触的间断,如果不能保证这一点,建议采用动力制动方式,以保证起升机构持续下降时调速制动的可靠性。
6 布线设计
6.1 变频器主回路
门座式起重机起升机构的变频器采用矢量控制方式,它们要用所传动电动机的一些电机常数,而数据的获得是由变频器的参数自检测程序来完成的。如果按常规的导线发热校验选择电机的配线,必然在长距离供电时,把线路阻抗加入到了参数自检测出的电机数据中,引起变频器的控制精度下降,达不到设计要求。另外,变频器与电动机之间的敷设距离长,则线路压降大,有时产生电机转矩不足。特别是变频器输出频率较低时,其输出电压也低,线路压降所占的比例增大。变频器与电机间的线路压降以不超过额定电压的2%为容许值,电机电缆的截面可据此来选择。
由于在变频器的输出布线中存在寄生电容,其容量与电机电缆的长度成正比,电机电缆的寄生电容容量越大,采用PWM控制方式的变频器输出电缆中的漏电流也越大,从而造成变频器的出力不够。所以在门座式起重机的布线设计中,应力求减小变频器到电动机的电缆的长度总和。
6.2 控制回路
变频器的控制信号为微弱的电压、电流信号,所以与主回路不同,变频器的输出回路是强电磁干扰源,因此,变频器控制回路的配线不能与变频器主回路配线在同一根铁管或同一配线槽内敷设。为了进一步提高抗干扰效果,还应采用1.0mm2绝缘屏蔽导线。绝缘屏蔽导线的接地应在变频器侧进行单点接地,使用专用的接地端子,不与其它的接地端子共用。电磁感应干扰的大小与电线的长度成比例,所以要尽可能地以最短的线路敷设。在电磁干扰严重的场合,除了采取接地、屏蔽等措施外,还可以在变频器的控制信号线上安装数据滤波器,以进一步减小干扰电压的影响。
7 CHV190起重机专用变频器在25t-35m门座式起重机中的应用介绍

7.1 25T-35M门座式起重机的主要参数如下:
(1)额定起重量:吊钩下25m处40T;抓斗25T;
(2)起升高度:抓斗轨上20m;轨下15m;吊钩轨上28m;轨下15m;
(3)幅度:最大35m,最小10m;
(4)工作机构运行速度
①起升速度:吊钩额定25m/min;抓斗额定50m/min;空载60m/min;
②旋转速度:0.8(幅度30-35m)/1.2(幅度10-30m)rpm;
③变幅平均速度:45m/min;
④行走速度:25m/min;
(5)电源:3相380V,50Hz
(6)整机工作级别:A8
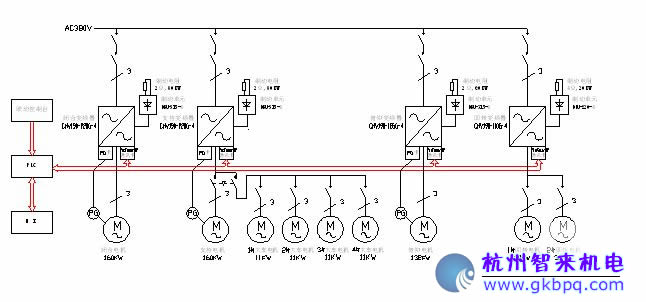
7.2 电气传动单线图
(1)起升机构
MC型40T抓斗门座式起重机起升机构由支持、闭合机构组成,两机构均由1台 160KW变频电机驱动,调速为带编码器的闭环矢量控制,采用INVT公司起重机专用变频器CHV190-220G-4;制动单元为DBU-315-4,制动电阻:2Ω80KW;属有档位无级调速方式,采用Profibus-DP现场总线控制,内设S曲线加减速模式,保证重物提升过程中的稳定性。
(2)俯仰机构
俯仰机构由1台132KW变频电机驱动,调速为带编码器的闭环矢量控制,采用INVT 公司起重机专用变频器CHV190-185G-4;制动单元为DBU-315-4,制动电阻:2Ω60KW;属有档位无级调速方式,采用 Profibus-DP现场总线控制,内设S曲线加减速模式,保证起升机构变幅过程中的稳定性。
(3)大车机构
大车运行机构由4台11KW变频电机驱动,和支持机构共用一台变频器通过切换分别控制,其中一组电机需要控制运行时,变频器接收到转换信号后自动切换到相应电机组参数。
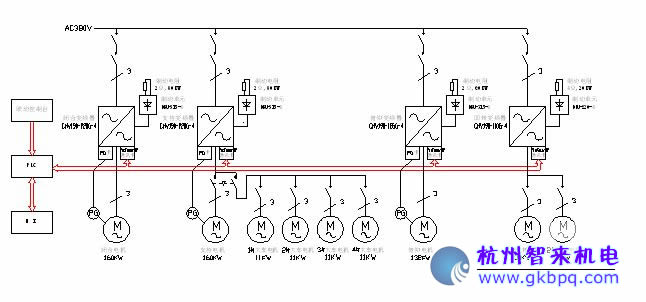
(4)回转机构
回转机构由2台30KW变频电机驱动,调速为开环矢量控制,采用INVT公司起重机专用变频器CHV190-110G-4;制动单元为DBU-220-4,制动电阻:4Ω20KW;属有档位无级调速方式,采用Profibus-DP现场总线控制,内设S曲线加减速模式,保证回转机构的大惯性负载起制动平滑和运行的稳定性。
7.3 系统优点
(1)可靠的抱闸逻辑控制,同时抱闸时间可调,在保证不溜钩的同时,也避免了电机的大冲击电流。
(2)高性能的闭环矢量控制,在零速时可输出180%的额定转矩长达10S。增加了系统的可靠性。
(3)提升机械采用轻负载升速(电子副钩)功能,吊重物时0-50HZ之间运行,空钩可实现0-100HZ之间运行,以提高工作效率;
(4)多段速或者模拟量调速,加减速过程均按照S曲线模式,增加了工作的稳定性,减小了机械冲击。延长设备使用寿命。
(5)多电机并联后,变频器自动辨识参数,建立有效的数学模型;控制精度非常高。
(6)单台变频器切换控制2组电机,自动辨识并存储两组电机参数,均可实现高性能控制。降低了设备的整机成本,极大提高了整机的竞争力。
(7)可调转矩补偿,实现精确控制。
7.4 变频器的现场调试
限于篇幅,下面以支持机构变频器的调试过程为例,简要介绍CHV190变频器的调试过程。
(1) 电机参数辨识
辨识电机参数在电机轴与负载脱开的情况下进行,首先设定电机参数P2.00-P2.05和编码器参数P4.00-P4.01,然后设定 P0.07为1进行电机参数自学习,主要的参数如下:
自学习完成后,设定速度由低到高空载闭环矢量运行,观察空载电流及电机运转,确保正常。
(2) 其它参数的设定
P0组(基本功能组)、P1组(速度曲线组)、P4组(编码器参数组)、P5组(输入端子组)、P6组(输出端子组)等参数可根据实际需要设定。
(3)抱闸时序控制测试
通过修改P8组 增强功能组中的抱闸合闸、松闸延时、停机延时等参数,调试抱闸时序控制情况。
(4) 带负载闭环矢量运行及验证轻负载升速(电子副钩)功能
观察抱闸时序控制正常后再安装好主轴联动机构,设定速度由低速到高速的步骤运行。带负载调试时,坚持由轻负载到重负载的步骤调试,同时注意观察变频器运行电流及电机运转状态。通过修改P8组(增强功能组)中的轻负载升速使能参数,验证吊重物时0-50HZ之间运行,空钩时0-100HZ之间运行。
(5)调试波形
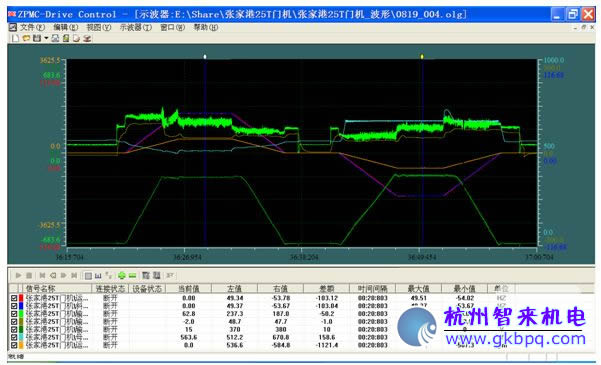
8 结束语
随着电力电子技术的不断发展完善,交流变频调速技术日益显现出优异的控制及调速性能,高效率、易维护等特点,加之它的价格不断下降,使其成为起重机械一种优选的调速方案。但是,要使变频器成功地应用于起重机调速,就必须针对起重机的特点,计算和选择变频器及其外围的辅件,并在安装与布线时采取特殊技术措施,以保证变频调速的起重机安全、可靠地运行。
参考文献:
1.INVT・CHV190变频调速器操作说明书[Z]・2009・
2.韩安荣・通用变频器及其应用[M]・机械工业出版社・2000・
3.段苏振・交流变频调速技术在门式起重机中的应用[J]・电气传动,2005,1・
4.段苏振・交流变频调速的电气制动方式[J]・机床电器,2004,3・ | | 服 务 项 目: | 1.精修变频器故障包括:不能启动、过流、过压、欠压、过热、过载、输出不平衡、无显示、有显示无输出、开关电源损坏、模块损坏、接地故障、不能调速、限流运行,等、
2.变频器维修 工业电源维修 电路板维修 触摸屏维修 伺服驱动器维修 工业电脑维修,
3.人机界面触摸维修,花屏、白屏、按触摸屏无反应或反应慢(触摸不良)、内容错乱、无背光、背光暗、有背光无字符、不能通信、按键无反应等 (可更换液晶屏)
4.维修各国品牌PLC、
5.维修电路板、工业电脑维修等
6.专业维修各种品牌伺服驱动等等、、、 | | 当你的各型号的变频器出现故障时、-------都可拿起您手边的电话与我们联系,本公司竭诚为您服务! |
|
|
| 上一条:英威腾CHV190系列变频器在门座式起重机中.. |
下一条:富士变频器维修--富士水泵变频器维修 |
|
|
|
|
|
|
|






